Prothesen sollen heutzutage nicht nur fehlende Gliedmaße ersetzen. Ziel sind Konstruktionen, die von den biologischen Körperteilen nicht zu unterscheiden sind. Britische und österreichische Forscher sind dem nun einen wichtigen Schritt näher gekommen.
Wenn Wissenschaftler sich die Natur zum Vorbild nehmen und versuchen, die natürlichen Vorgänge und Techniken mithilfe der Elektromechanik nachzuahmen, spricht man von „Bionik“. Speziell im Bereich der Prothetik arbeiten Forscher an der Entwicklung von Prothesen, die den menschlichen Gliedmaßen in Aussehen und Funktion möglichst nahe kommen. Die Steuerung der bionischen Prothesen übernehmen häufig Elektroden, die implantiert werden und dann elektrische Impulse vom Gehirn an die Prothese weiterleiten. Oskar Aszmann, Professor an der Universitätsklinik für Chirurgie der MedUni Wien, und Dario Farina vom Department of Bioengineering, Imperial College London, stehen diesem Verfahren jedoch kritisch gegenüber. Sie vertreten die Meinung [Paywall], dass die meisten dieser Techniken den Betroffenen mehr schaden als nützen.
2014 hatten Aszmann und Farina [Paywall] eine Handprothese vorgestellt, die über myoelektrische Signale, also über elektrische Signale der Muskeln, gesteuert wird. Der Muskel verstärkt dabei die Signale der noch vorhandenen Nerven. „Bionische Rekonstruktion“ nennen die Forscher diese Methode, die erstmals im Jahr 2009 angewandt wurde. „Durch die Muskelkontraktion entstehen ausreichend starke elektrische Signale. Diese Myosignale dienen dazu, die neue mechatronische Hand zu steuern,“ erklärt Aszmann. Drei Patienten hatten sich für die Studie bereit erklärt, ihre funktionslose Hand amputieren und durch eine willentlich steuerbare Handprothese ersetzen zu lassen. Zur Signalverstärkung der noch vorhandenen Nerven hatten Aszmann und Farina ihnen in den Unterarm Muskel aus dem Oberschenkel transplantiert. Nach wenigen Monaten waren die Patienten in der Lage, einfache Aufgaben auszuführen. „Für die Betroffenen ist es ein immenser Mehrwert wieder mit zwei funktionsfähigen Händen zu leben. Die Patienten finden dadurch in die Arbeitswelt zurück, ihr Beziehungsleben und ihr Privatleben verbessern sich deutlich,“ so Studienleiter Aszmann. Ein weiterer positiver Effekt ist, dass die Probanden nach der Amputation weniger unter Phantomschmerzen leiden, da das Phantom durch eine funktionierende Handprothese ersetzt wird.
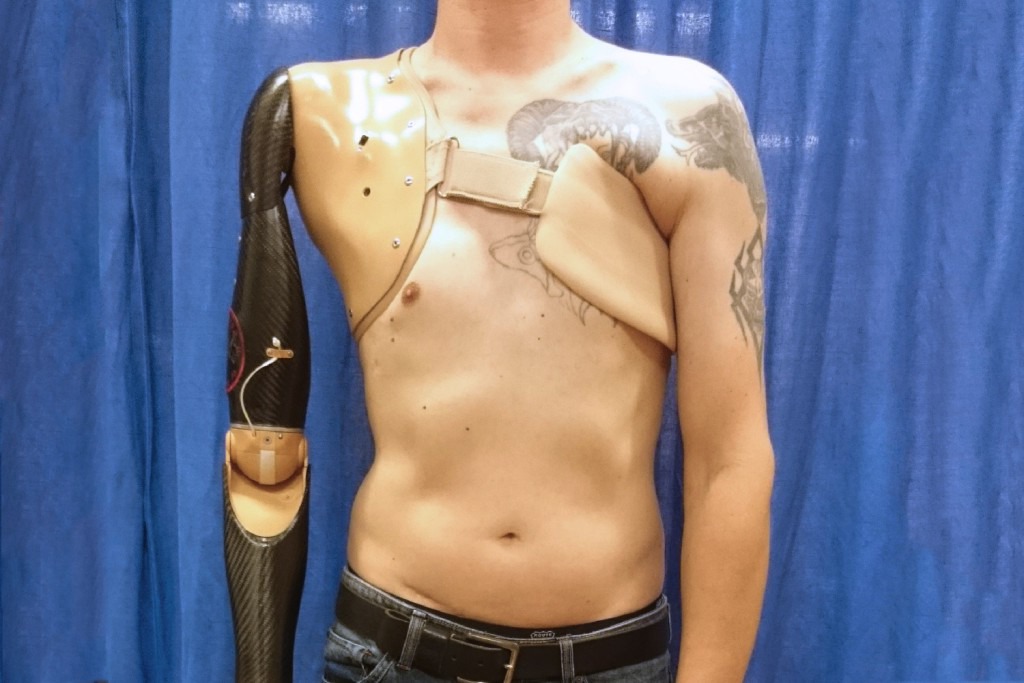
Die Ansteuerung von myoelektrischen Prothesen ist eine große Herausforderung. Sie werden häufig von Muskeln gesteuert, die durch die vorangegangene Amputation beschädigt wurden. Außerdem wird für die Steuerung der Prothese das globale Elektromyographie-(EMG) Signal verwendet, das jedoch durch andere Efferenzen stark verrauscht ist. Dies bewirkt eine unzulängliche Kontrolle der Prothese und veranlasst die Patienten, die Prothese selten oder gar nicht zu benutzen. Farina und Aszmann haben nun eine Technologie entwickelt, bei der erstmals das Aktivitätsmuster einzelner Motoneurone und nicht ganzer Muskelgruppen zur Steuerung einer Armprothese verwendet werden kann. Diese neue Herangehensweise ermöglicht eine detailliertere Analyse des Input-Signals und eine intuitivere Steuerung der Armprothese. An der Studie nahmen sechs Patienten teil, welche ihren Arm teilweise oder komplett verloren hatten. In einer Operation wurde ein Teil des peripheren Nervensystems, das für Hand- und Armbewegungen zuständig ist, in intakte Muskeln in der Brust oder im oberen Teil des Arms umgeleitet. Dieses Verfahren nennt man Targeted Muscle Reinnervation (TMR). Die neuronale Kontrolle der Handfunktion konnte so in diesen Muskeln Impulsmuster generieren, welche die Wissenschaftler mittels hochauflösender EMG-Ableitungen entschlüsseln konnten.
Mit Hilfe von Computermodellen konnten nun zum ersten Mal die Aktivitätsmuster einzelner motorischer Einheiten sichtbar gemacht und analysiert werden. Bestimmte Parameter, wie die zeitlichen Muster neuronaler Entladung, konnten so den spezifischen Bewegungen des Arms zugeordnet werden. Anhand dieser Daten übersetzten die Wissenschaftler Signale spinaler Motoneurone in Steuerbefehle, die die Armprothese der Probanden kontrollierten. Die Probanden konnten so komplexe Bewegungen (z. B. Pronation, Supination) ausführen und erreichten eine bisher unerreichte Bewegungsfreiheit mit der Armprothese. Für die Betroffenen bedeutet diese Art der Steuerung eine enorme Erleichterung. Bei den klassischen TMR-EMG-Verfahren mussten die Patienten die Muskeln des durch TMR innervierten Zielgebiets kontrahieren, um die Armprothese zu steuern. Dank der neuen Technologie genügt es nun, sich die Bewegung vorzustellen. Diese Herangehensweise ermöglicht eine intuitivere Kontrolle der Armprothese und eine wesentlich höhere Bewegungsfreiheit. Steuerung der Armprothese durch neuronale Aktivität © Imperial College London
„Wir haben ein neues Verfahren getestet, bei dem wir den Fokus von den Muskeln auf das Nervensystem gelenkt haben. Das heißt, dass unsere Technologie Signale genauer detektieren und decodieren kann,“ sagt Farina. Allerdings – so die Autoren – können die Ergebnisse nicht verallgemeinert werden, da das System bisher nur an sechs Patienten getestet worden sei. Trotzdem soll die Prothese innerhalb der nächsten drei Jahren auf den Markt kommen. Bis dahin wollen die Wissenschaftler den künstlichen Arm robuster und praxistauglicher machen. Beispielsweise wollen sie den Computer, der die Nervensignale auswertet, durch in die Prothese integrierte Mikroprozessoren ersetzen. Nach Ansicht der Autoren hat dieses Verfahren viel Potenzial. Die Methode ermögliche es, die Aktivität eines jeden Nervs zu erfassen – und das sogar, wenn gar kein Ziel-Muskelgewebe vorhanden sei. Denn fehlt dieses, könne man es einfach transplantieren oder – in der Zukunft – auch züchten, so die Autoren.