Mikro- oder Nano-Roboter könnten im menschlichen Organismus künftig medizinische Dienste verrichten. Einem Team um Forscher des Stuttgarter Max-Planck-Institus für intelligente Systeme ist es nun gelungen, ein Mini-U-Boot zu entwickeln, das sich nach Muschel-Art fortbewegt.
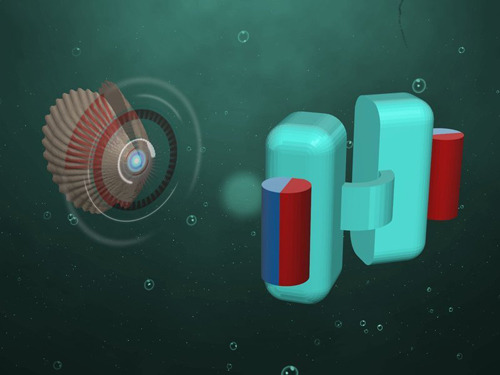
Wissenschaftlern ist es gelungen, Schwimmkörper zu konstruieren, die erstmals gleich zwei Funktionen erfüllen: Sie wären klein genug für einen Einsatz in Körperflüssigkeiten oder sogar in einzelnen Körperzellen. Und sie sind so gebaut, dass sie sich in Flüssigkeiten durch ihre eigene Bewegung selbstständig fortbewegen können. 1966 erschien der Film „Die phantastische Reise“. Ein U-Boot wird darin samt Personal so sehr verkleinert, dass es sich durch einen menschlichen Körper bewegen und die Besatzung im Gehirn eine Operation durchführen kann. Bis heute ist das Sciencefiction, und der Transport eines OP-Teams zu einem Krankheitsherd wird es sicher auch bleiben. U-Boote, die sich durch den Körper manövrieren lassen, könnten dennoch von großem Nutzen sein: Sie könnten einen pharmazeutischen Wirkstoff gezielt an einen bestimmten Punkt etwa in der Netzhaut bringen. Oder ein medizinisches Gerät punktgenau im Organismus platzieren. Und sie könnten es ermöglichen, eine Gentherapie gezielt an bestimmten Zellen vorzunehmen. Wenn es nach Peer Fischer, Leiter der Arbeitsgruppe „Mikro-, Nano- und Molekulare Systeme“ am Max-Planck-Institut für Intelligente Systeme in Stuttgart, geht, können Mediziner in absehbarer Zukunft auf Mikro- oder sogar Nano-Roboter zurückgreifen, um solche Aufgaben zu erfüllen. Die kleinen Helfer sollen die gewünschten Ziele im Körper akkurat ansteuern, ohne dass ein größerer operativer Eingriff nötig wäre. Mikroschwimmer in Muschelform: Nach dem Vorbild der Schalentiere hat ein Team um Stuttgarter Max-Planck-Forscher ein winziges U-Boot konstruiert, das rechts schematisch gezeigt ist. Mithilfe kleiner Magnete, die hier als rot-blaue Zylinder dargestellt sind, lassen sich die beiden Hälften des Schwimmkörpers öffnen und schließen. © Alejandro Posada/ MPI für Intelligente Systeme
Bei diesem Vorhaben gibt es allerdings zwei grundlegende Herausforderungen. Natürlich müssen solche Vehikel ausreichend klein sein, um zum Beispiel per Spritze in den Augapfel injiziert werden zu können. Zum anderen müssen sie sich, einmal in den Körper gebracht, dort auch in der gewünschten Weise und Richtung fortbewegen können. In beiderlei Hinsicht vermelden Forschergruppen um Peer Fischer nun Fortschritte. Gemeinsam mit Forschern am Technion in Israel und an der TU Dortmund hat die Stuttgarter Gruppe in einer aktuellen Arbeit eine Art künstliche Muschel entwickelt, die nur wenige Hundert Mikrometer groß ist. Diese haben die Wissenschaftler so konstruiert, dass sie sich in Testflüssigkeiten durch einfaches Öffnen und Schließen der Muschelschalen fortbewegt. Das ist nicht so selbstverständlich, wie es zunächst klingt. „Die Muschel ist ja nur wenige Male größer, als ein menschliches Haar dick ist“, erklärt Fischer. „Für die ist eine Flüssigkeit wie Wasser also etwa so zäh wie für uns Honig oder gar Teer.“ Und bei so hoher Reibung in Flüssigkeiten gilt eigentlich, dass symmetrische Bewegungen, wie eben das gleichförmige Öffnen und Schließen einer Muschelschale, unter dem Strich kein Fortkommen bewirken. Das Vor und Zurück durch die jeweils gegensätzlichen Bewegungen heben sich schlicht auf. In Wasser wäre die Mikromuschel aus diesem Grund in der Tat nicht vom Fleck gekommen. Doch weil die Forscher langfristig den Einsatz in biologischen Medien im Auge haben, testeten sie ihren Schwimmer direkt auch in dafür geeigneten Modellflüssigkeiten. Und die weisen im Gegensatz zu Wasser Besonderheiten auf. „Die meisten Körperflüssigkeiten haben die Eigenschaft, dass sich ihre Viskosität je nach Bewegungsgeschwindigkeit ändert“, sagt Fischer. „In Gelenkflüssigkeit zum Beispiel ordnen sich Hyaluronsäure-Moleküle im Ruhezustand zu netzwerkartigen Strukturen an, die für eine hohe Viskosität sorgen. Doch sobald sich etwas durch diese Flüssigkeit bewegt, bricht das Netzwerk auf – und das Fluid wird dünnflüssiger.“
Genau dieses Verhalten machten sich die Wissenschaftler bei ihrer Muschel zunutze. Konkret steuerten sie die Muschelschalen so, dass sie sich sehr viel schneller öffnen als schließen. „Dieses zeitlich asymmetrische Bewegungsmuster führt dazu, dass die Flüssigkeit während des Öffnens dünnflüssiger ist als beim anschließenden Schließen“, sagt Doktorand Tian Qiu vom Stuttgarter Team. Damit ist die Distanz, die die Muschel beim Öffnen zurücklegt, auch eine andere als die, um die sie sich beim Schließen wieder zurückbewegt. Netto kommt sie also voran. Es sei das erste Mal überhaupt, dass sich ein künstliches Gebilde dieser Größenordnung mit symmetrischen Bewegungszyklen in Flüssigkeiten fortbewegte, so Tian Qiu. Um ihren Mikroschwimmer überhaupt derart kontrollieren zu können, arbeiteten sie in der Achse, die das Gelenk zwischen beiden Muschelschalen bildet, magnetische Seltenerdmetalle ein. Über ein von außen angelegtes Magnetfeld regulierten sie dann, wie sich die Muschelschalen öffnen und schließen – letztlich also, wie sie sich fortbewegen. Die Erkenntnis der Stuttgarter Forscher, dass mikroskopische Vehikel durch manche Flüssigkeiten auch mit symmetrischen Bewegungen schwimmen, gilt aber nicht nur für magnetisch angetriebene Tauchfahrzeuge. Vielmehr lässt sich ein Miniatur-U-Boot in Muschelform auch durch andere Aktuatoren bewegen, etwa einen, der auf eine Temperaturveränderung reagiert. Die eigentliche Muschel bestand aus einem relativ harten Kunststoff. Hier lag die besondere Herausforderung darin, die Muschelschalen einerseits extrem dünn und andererseits robust genug für die „Ruderbewegungen“ in einem vergleichsweise zähen Medium zu gestalten. Die Wissenschaftler, die ihre Arbeit nun in Nature Communications vorstellten, wollen ihre Mikroschwimmer nun in konkreten biologischen Flüssigkeiten testen. „Uns interessiert im nächsten Schritt zum Beispiel, ob wir diesen Roboter auch durch eine extrazelluläre Matrix, also durch ein Gewebe, steuern können“, so Peer Fischer.
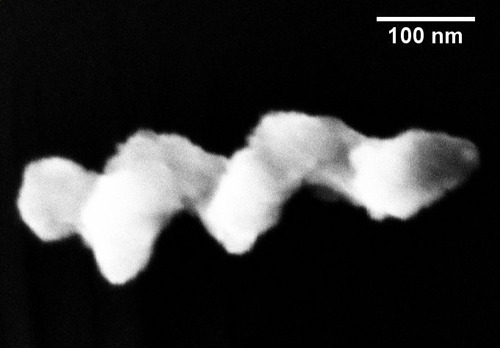
Für die Stuttgarter Gruppe um Peer Fischer war es schon der zweite Miniatur-Roboter, den sie innerhalb kurzer Zeit der Fachwelt vorstellten. Bereits in der September-Ausgabe von ACS Nano hatten sie gemeinsam mit Kollegen aus Israel ein sogar noch deutlich kleineres Vehikel präsentiert. Dabei handelt es sich um eine gläserne korkenzieherähnliche Schraube. Solche schraubenartigen Strukturen gibt es schon länger. Allerdings war ihre Herstellung bis vor kurzem auf Größenordnungen im Bereich von zehn und mehr Mikrometern begrenzt. Jetzt war es den Forschern aus Stuttgart zum ersten Mal gelungen, einen entsprechenden Propeller mit einem Durchmesser um die 100 Nanometer, also einem Zehntel Mikrometer herzustellen. In der Länge misst der Miniatur-Schwimmer 400 Nanometer. Bei der Fabrikation ihres Nanopropellers nutzten die Wissenschaftler eine Technik, die sie selbst entwickelt haben. Dabei dampfen sie das Silicat-Material Schicht für Schicht in geometrisch definierter Weise auf. Nano-U-Boot mit Propellerantrieb: Solch eine winzige Schraube versehen die Stuttgarter Forscher mit Magneten und versetzen sie durch ein Magnetfeld in Drehung, sodass sie sich durch eine Flüssigkeit schraubt. © Debora Schamel/MPI für Intelligente Systeme Um den kleinen Roboter antreiben zu können, versahen die Wissenschaftler ihn stellenweise mit magnetischem Nickel. Legten sie dann ein Magnetfeld an und ließen es um eine bestimmte Achse rotieren, so versetzen sie auch die nickelhaltige Nanoschraube in Rotation. Und damit genau in die Bewegung, mit der sich der Propeller in einer Flüssigkeit voranbewegen kann. Wie bei ihrer Mikromuschel aus Kunststoff, so zielen die Visionen der Forscher auch bei ihrem gläsernen „Nano-U-Boot“ auf medizinische Anwendungen. Als Testmedium wählten sie daher ebenfalls Hyaluronsäure. „Dabei handelt es sich um ein Polysaccharid, dessen Moleküle im Verbund gelartige und damit hochviskose Strukturen bilden“, erklärt die Mitautorin Debora Schamel, die am Stuttgarter Max-Planck-Institut promoviert. Im menschlichen Organismus kommt es nicht nur in Gelenkflüssigkeit, sondern etwa auch in vielen Bindegeweben vor. Bisherige künstliche Gebilde waren noch zu groß, um das eng geflochtene Netzwerk der Hyaluronan-Moleküle zu durchdringen. Debora Schamel freut sich daher über den Fortschritt ihres Teams: „Erstmals haben wir jetzt einen Nano-Roboter, der klein genug ist, um auch durch diese engen Maschen zu schwimmen.“ Das winzige U-Boot könnte aber auch in anderen Medien als Gelenkflüssigkeit zum Einsatz kommen. Weitere Flüssigkeiten, in denen solche Nanovehikel zum Beispiel Wirkstoffe transportieren könnten, seien der Glaskörper im Auge, Schleimhäute – oder auch Blut. „Theoretisch ist bei der Größe unserer Konstruktion sogar eine Verwendung innerhalb von Zellen denkbar“, so Fischer vorsichtig. Dazu freilich müsste noch ein Weg gefunden werden, die Nano-U-Boote auch in die Zellen einzuschleusen. Bis ähnliche Therapien, wie sie „Die phantastische Reise“ von 1966 schildert, Wirklichkeit werden, bleibt also noch einiges zu tun. Originalpublikationen: Swimming by reciprocal motion at low Reynolds number Tian Qiu et al.; Nature Communications, doi: 10.1038/ncomms6119; 2014 Nanopropellers and Their Actuation in Complex Viscoelastic Media Debora Schamel et al.; ACS Nano, doi: 10.1021/nn502360t; 2014