Es ist vielleicht ein Meilenstein in der Chirurgie. In Washington hat erstmals ein Roboter einen Teil einer Darmanastomose-Operation übernommen – autonom und programmgesteuert. Was am Schwein erfolgreich verlief, könnte bald auch zur OP-Routine in der Klinik werden.
Autos können inzwischen nicht nur ohne Hilfe des Fahrers einparken, sondern sind auf dem Weg, ihm sämtliche andere lästige Arbeiten wie Lenken, Abstand kontrollieren und sogar Überholen abzunehmen – wenn er das denn möchte. Auch der autonome Rasenmäher erkennt inzwischen von selber, nicht gegen den Baum und ins Blumenbeet zu fahren. Im Operationssaal liegen die Dinge noch ein wenig anders: Hilfreiche menschliche Geister reichen dem Chirurgen die notwendigen Geräte, mit denen er Gewebe durchschneiden, bei Bedarf entfernen und wieder zusammennähen kann.
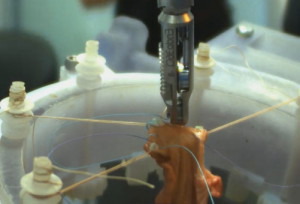
Einen Patienten, der ohne Hilfe von Ärzten nur entsprechend einem vorprogrammierten Ablaufplan operiert wird, kann sich im Moment noch niemand so richtig vorstellen. Und dennoch erschien vor etwa drei Wochen ein Artikel [Paywall] in der renommierten Zeitschrift „Science Translational Medicine“, der vielleicht den Start in die vollautomatisierte Chirurgie beschreibt. Schaut man auf die Geschichte der Operationskunst, haben sich die Techniken weiterentwickelt. Die Überlebensraten gehen nach oben, die Rate der Komplikationen sinkt jedoch nicht wirklich. Noch immer hängt der Erfolg einer OP sehr stark vom individuellen Können des Chirurgen ab, von seiner Konzentrationsfähigkeit und zuweilen auch von dessen Tagesform. Diese variablen Faktoren waren Antrieb für ein Entwicklerteam des Children’s National Medical Center in Washington, einen Roboter so zu programmieren, dass er chirurgische Routineaufgaben möglichst fehlerfrei erledigen kann: Aufgaben, die trotzdem ein bestimmtes Maß an chirurgischer Erfahrung und auch Können erfordern, damit Komplikationen ausbleiben. Hier vernäht der Roboter bei einer ex-vivo Dünndarm-Anastomose © Sheikh Zayed Institute for Pediatric Surgical Innovation
Schon seit einiger Zeit lassen sich chirurgische Operationen an relativ starrem Körpergewebe wie etwa Knochen mit vorprogrammierten Abläufen [Paywall] und entsprechenden Geräten bewerkstelligen. Mit guter präoperativer Bildgebung gibt es nur wenig Unterschiede zwischen OP-Plan und Wirklichkeit. Bei der Handhabung von weichem Gewebe haben aber diese Methoden bisher nicht funktioniert. Das schlüpfrige bewegliche Gewebe zu erkennen, zu fixieren und dann gezielt zu bearbeiten, ist eine ganz besondere Herausforderung. Dabei könnten sich die Ärzte bei rund sieben Millionen solcher Operationen in Deutschland zumindest helfen lassen, wäre die entsprechende Technik verfügbar. Während zum Beispiel das vielfach eingesetzte Da Vinci-Operationssystem schon ganz auf Robotik vertraut und damit zum Beispiel ein Zittern der Hand oder ein unscharfes Bild eliminieren kann, ist das jetzt vorgestellte „STAR“-System (Smart Tissues Autonomous Robot) weitgehend unabhängig von der Steuerung eines Menschen. Voraussetzung dafür war jedoch nicht nur eine gute Programmierung der Bewegungen des Roboters, sondern auch entsprechende Sensoren und eine gute Optik. Eine plenoptische Kamera sorgt in diesem Fall für eine dreidimensionale Auflösung der Strukturen, NIRF (Nahinfrarot-Fluoreszenz) mit entsprechenden Markern in den Geweben dafür, dass auch bei schwierigen Lichtverhältnissen die Grenzen der Gewebe und ihre Bewegungen gut zu differenzieren sind und computergesteuert in die Aktionen des Roboterarms einfließen.
Welche anspruchsvolle chirurgische Tätigkeit könnte nun gut auf einen selbständigen Roboter übertragen werden? Peter Kim und sein Team suchten sich als Modellprojekt für ihre Machbarkeitsstudie eine Anastomose aus, die Verbindung von röhrenförmigen Organstrukturen. Besonders bei Operationen am Darm kommt es dabei immer wieder vor, dass die Nähte dem Druck nicht standhalten und lecken: Bei fast 20 Prozent bei OPs im Kolorektal-Bereich und gar 25–30 Prozent bei der Abdominalchirurgie. Entsprechend den Leitlinien und Empfehlungen für eine optimale Naht programmierten die Entwickler demnach den Roboter für der Verbindung der Enden eines Schweinedünndarms. Die Ergebnisse dieser „vollautomatischen Nähmaschine“ bei ex-vivo und in vivo-Einsätzen verglichen die Entwickler mit der gleichen Prozedur, ausgeführt als laparoskopische Operation, Roboter-assistierte Chirurgie oder offene OP eines erfahrenen Chirurgen.
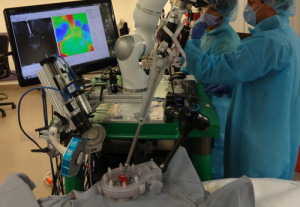
Das STAR-Programm erzielte im Vergleich zur Konkurrenz bei den ex-vivo Versuchen mit dem Kadaver-Schweinedarm eine deutlich gleichmäßigere Naht. Das machte sich auch beim Test auf Dichtigkeit bemerkbar. Der Druck, dem die Naht maximal standhielt, war höher als bei allen anderen OP-Techniken. Fehler mit falschem Nadeleinstich waren seltener als bei Laparoskopie und dem da-Vinci-System. Auch bei der entsprechenden Operation am lebenden Tier zeigte der selbständige Roboter, was er kann. Alle fünf Schweine überstanden die Operation ohne Komplikation und legten nach ihrer Genesung wieder an Gewicht zu, ebenso wie bei der offenen Kontrolloperation durch die Hand des Chirurgen. Roboter ‚STAR‘ bei einer in-vivo Darm-Anastomose-OP am Schweinemodell © Axel Krieger Die Autoren betonten, dass es sich bei diesen Versuchen erst um eine Machbarkeitsstudie handle. Die Entwicklung hin zu einem serienreifen Instrument würde noch einige Verbesserungen bringen. Der Roboter wurde als Gerät konstruiert, das auch mit der Assistenz eines menschlichen Gehilfen arbeiten kann. In 40 Prozent der Nähte entschieden sich die Experten-Beobachter für eine Korrektur der Stiche, bei 60 Prozent hatte die Jury nichts auszusetzen. Auch beim Zeitbedarf scheint es noch Verbesserungsmöglichkeiten zu geben. Der Arzt benötigte bei der offenen OP im Durchschnitt nur acht Minuten für die Naht, die beim programmgesteuerten Roboter rund 50 Minuten in Anspruch nahm. Die Schnelligkeit, so beteuerten die Entwickler, sei jedoch kein Problem bei einer Weiterentwicklung. „Wir ließen die Maschine nicht so schnell laufen, wie sie eigentlich könnte“, sagt Projektleiter Axel Krieger. Der derzeitige Zeitaufwand, so die Autoren, sei mit dem bei laparoskopischen und roboterassistierten Operationen vergleichbar.
Die Maschine, so erklärt sein Kollege Peter Kim, „wurde nicht dazu entworfen, den Chirurgen zu ersetzen, sondern um seine Fähigkeiten mit geeigneter Optik, Fertigkeiten und zusätzlicher Computerintelligenz zu erweitern“. Ziel waren demnach bessere Ergebnisse und zusätzliche Sicherheit für Patienten. Dementsprechend sei die Anastomose nur ein Modellfall für etliche chirurgische Tätigkeiten, die mit einem Programm automatisiert werden können. Eine vollständig automatisierte Appendektomie wäre nach den Vorstellungen der Autoren durchaus denkbar. Auch eine zukünftige Miniaturisierung und einen entsprechenden Umbau für minimal-invasive Eingriffe kann sich Kim vorstellen. Dabei müssten dann die Fluoreszenzmarker zur genauen Verortung der Gewebe nicht mehr manuell so wie in der Testversion aufgebracht werden. Fazit: Vor kurzem wurden auf dem Deutschen Chirurgenkongress erste Daten zur ROLARR-Studie (Robotic versus Laparoscopic Resection for Rectal Cancer)-Studie vorgestellt, einem klinischen Vergleich von laparoskopischer und roboterassistierter Chirurgie bei Darmkrebs. Die Multicenter-Studie in 10 Ländern ergab Vorteile für die roboterassistierte Methode. Soweit ist „STAR“ noch nicht. Bis zu einem Probelauf in der Klinik dürfte noch einige Zeit vergehen. Aber gerade für chirurgische Routinearbeiten, die dennoch hohe Präzision erfordern, scheint der computergesteuerte Roboter eine gute Alternative zu sein. Genauso wie beim Personentransport die fahrerlose U-Bahn oder das selbstfahrende Auto. Originalpublikation: Supervised autonomous robotic soft tissue surgery [Paywall] Azad Shademan et al.; Science Translational Medicine, doi: 10.1126/scitranslmed.aad9398; 2016